-84是我最早的FPV固定翼载机,飞翼体积小巧,易于携带。旧机在多次飞行后破烂不堪并退役,在此我又一次准备了一台Z-84,作为FPV备用机。
使用的飞控是 OmnibusF4 v3 ,说来惭愧,这是我第一块使用F4级别处理器的飞控,之前苦于Pixhawk价格太高,一直使用着APM,直到接触iNAV以后,发现居然有如此低价的一款F4飞控。
该飞控集成度很高。
优点:
1.板载稳压模块(5V1A),飞控板直接引入电池电源,并且完成电压采样(Pro版本甚至集成了电流采样)。
2.自带OSD,使用处理器的SPI接口直接使用DMA模式和7456芯片通讯,节省系统开销,而且OSD的界面布局直接通过iNAV的软件来进行,非常直观方便。图传和相机可以直接连到飞控板上,通过飞控的管脚直接从前面的电池电源取电。
3.连接GPS时,可以实现航点飞行和自动返航。
4.接口丰富,串口够用。
5.性能强大的同时,体积和CC3D相当。
缺点:
全部管脚都是2.54间距,尤其是板上直接引入了电池电源,如果焊接不当,造成短路,飞控很容易就损毁。这类板子的插件基本都省略了,都是让用户自己焊接,对用户的焊接功底有一定的要求。
在Z-84飞翼上,我将安装 iNAV 固件,以实现远距离FPV中要用到的航点飞行和自动回家功能。
一开始打算使用ULRS链路,后来由于体积所限和没有实时数传的必要,因此改用了OpenLRS,接收机是我自己设计布板的一款小体积PPM接收机。GPS连接一路串口,iNAV可以自主配置GPS参数,这个特性对于没有永久存储参数能力的低端GPS模块很友好。

飞控板的预处理主要有PPM焊盘和RAW电源选择,RAW电源我选择和电池连在一起,让电池直接给相机和图传供电。

电源:电池插头出来后分为两路,一路给电调,另一路通过磁环滤波以后连到飞控板。飞控板上的5V是板载整流后的电源总线,因为5V还要带动GPS,接收机等外设,因此我还在5V总线上并联了一个4700uF大电容,确保电源供应平稳。因为摄像头和图传是通过飞控来间接取电,我把电源先通过一个磁环滤波再接入飞控,这样避免了电机工作的纹波影响图像质量。
电调与舵机:电调的BEC专门给舵机供电,因为飞控自带整流了,不需要飞控的5V进来瞎参合。传统的接收机或是飞控,往往共享电调上面的一路BEC电源,有关的实践证实舵机在工作的时候会对电源产生明显的扰动,甚至会导致飞控失电压宕机重启;对此,我在使用飞控的时候,都会使用独立的供电方案,防止舵机这一类粗犷的用电器污染飞控的电源
GPS:国产GPS模块,标称采用瑞士芯片。搜星效果还很不错,买价50RMB,在飞控上配置为ublox即可,插上即用
蜂鸣器:5V的有源蜂鸣器,接入板上的Buz口,注意正负。蜂鸣器的提示音还是挺有用的,可以指示电池电压不足,飞行模式切换,电机解锁状态等信息
动力组:一开始使用2208电机,后来改用MT1806电机,配合5*3桨。1806电机较小,我使用了一个3D打印的电机座,通过泡沫胶粘在原电机座的位置
接收机:LazeRX-Mini PPM接收机
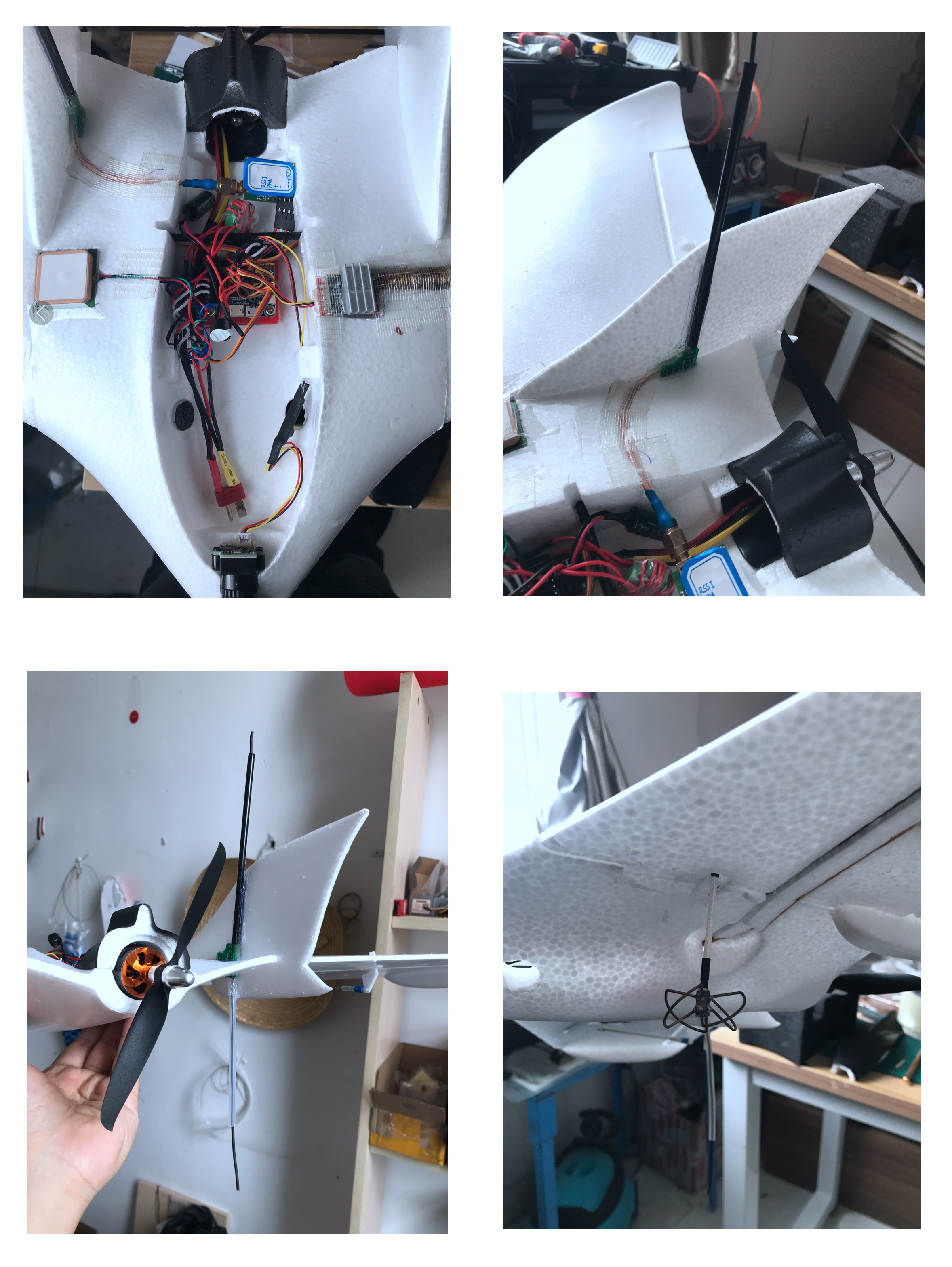
接收机天线:433MHz偶极子天线,安装在右侧垂尾旁边。天线上面一极套硬管,下面一极套软管,避免着陆损坏天线
图传:600mW5.8G图传
图传天线:四叶草天线,90度接头,天线位于机翼下方
摄像头:FPV摄像头使用2.8mm镜头,视角120度
相机:Hawkeye鹰眼小方狗相机或其他小型相机
我采用如下参数进行飞行,不保证是最优参数。

Yaw的90度让飞控的USB口朝前,方便连接PC进行调试。
Roll的6度的效果是让level模式下有一个6度的迎角,因为yaw旋转了九十度,roll的角度其实变成了pitch,因为我发现在level飞行下,飞机在这个迎角下还可以保证飞行不掉高度,否则飞行全程都要拉杆很累。
Analog RSSI input: 开启了外部rssi模拟量输入,连接ppm接收机上的rssi脚,用来监控信号强度。
Permanently enable AIRMODE:强制开启air模式,在不开启其他模式的时候,保留基本的rate反馈。
飞行模式和段位开关:
和APM飞控一样,我通过OpenTX发射机固件,使用三段+两段开关实现了六模式切换。
我使用的飞行模式:
AIR MODE
ANGLE:角度自稳,操纵杆回中飞机改平
NAV RTH:返航
NAV CRUISE + NAV ALTHOLD:锁向定高巡航
NAV POSHOLD + NAV ALTHOLD:定高原地盘旋
NAV WP:航点飞行
要注意,和APM不一样的是,CRUISE巡航模式和POSHOLD盘旋模式是默认不包含定高的,有需要的话必须自行同步开启ALTHOLD。如果开启了CRUISE+POSHOLD,那么这是你的油门摇杆是没有作用的,不像APM那样影响空速,电机的油门被飞控完全控制了。
和GPS相关的解锁失败:
一旦飞控开启了GPS功能,那么解锁电机(ARM)会对GPS定位质量有要求,如果卫星数量太少,例如少于六个,会拒绝解锁无法起飞。更进一步,如果你想开启航点飞行,如果第一个航点的距离距离起飞点过远(默认是100m,可以修改到600m),飞控也会拒绝解锁。
飞行任务规划:
这个特性和APM也有所不同。对APM飞控,航点数据(Way Point)是强制存到EEPROM中的,只要开启了AUTO模式,飞控就会读取存储的航点并自动飞行。而iNAV中航点数据有两个存储位置,分别是单片机的RAM和单片机的EEPROM。RAM的航点,在飞控刚上电的时候是空的,需要从EEPROM中加载或是使用配置工具上传,并且在飞控掉电以后航点就丢失了;EEPROM中的航点可以断电保存。飞控要执行WP飞行时,只会读取RAM的航点。

要进行航点飞行,有几种方式:
1.飞控开机以后,连上了配置工具,在PC上设置航点,点击“Save to FC”,然后不要断电或重启,直接起飞,开启NAV WP。
2.飞控在家里连接配置工具,在PC上设置航点,点击“Save to FC”,然后点击“Save Eeprom mission”,然后飞控关机;到飞行场地以后,使用摇杆组合技(油门低,方向舵中,升降舵高,副翼高),飞控就把eeprom中的航点加载到RAM中了,随后起飞,开启NAV WP。
3.和2一样,不用摇杆组合技的话,也可以在外场通过配置软件,点击“Load Eeprom mission”,也可以加载航点。