这里以2.35a版本和两块LazeLink-LITE模块为例,演示基本的配置和部署。
首先,你要从官网获取ULRS配置软件(以下简称CC):
CC安装完成以后,点击运行。这时会弹出对话框,告知该版本剩余的运行天数(例如 2 of 60 days)。你可能会奇怪为什么会有运行时限?作者的解释是:当前ULRS依旧处于活跃的开发阶段,一般几个礼拜就有新版本发布,作者希望大家主动安装最新版的软件,所以才让每一个版本在60天内强制失效(固件和CC无关,可以永久运行)。必须承认,存在这种可能,作者不再发布新版本,时间到期后地面站配置工具不再可用的情况,那样手里所有的模块都将无法修改配置,新的模块无法初始化,望知晓这些风险。
回到模块的初始化,如果还没有安装固件,首先通过USB连接到PC,同时打开ULRS软件,选择正确的端口,点击连接,然后进入“Firmware upgrade”选项卡。如果你尚未安装WinAVR,会提示你下载安装。硬件类型选择“OrangeRX”,按下固件升级按钮“Upgrade firmware”:
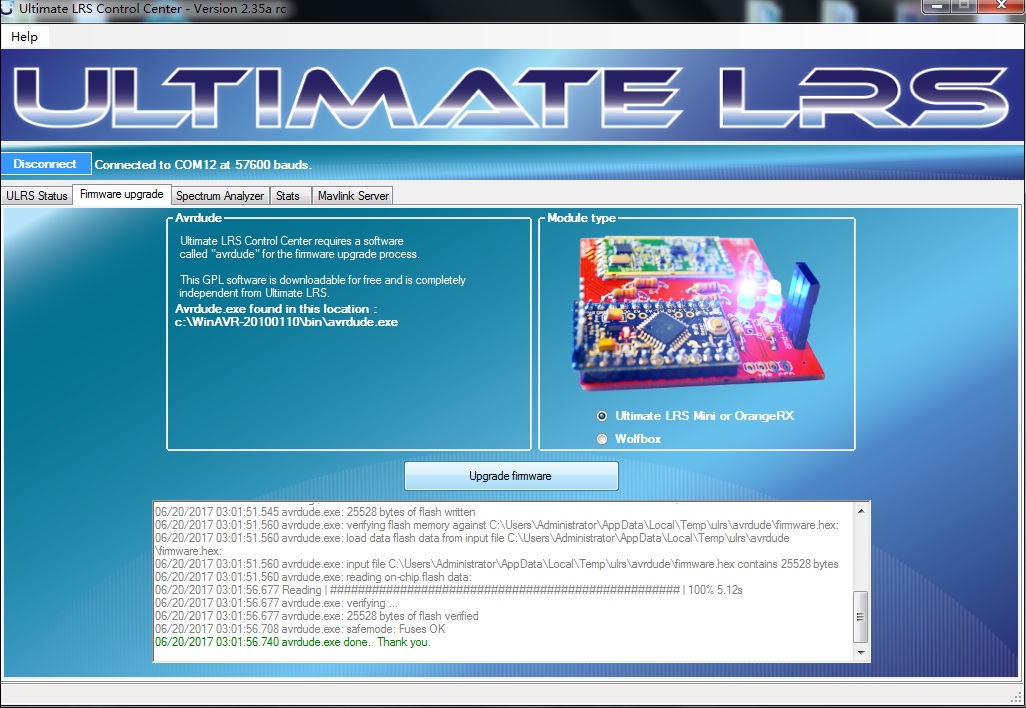
不出意料的话(记住跳线帽),烧写过程会很顺利。
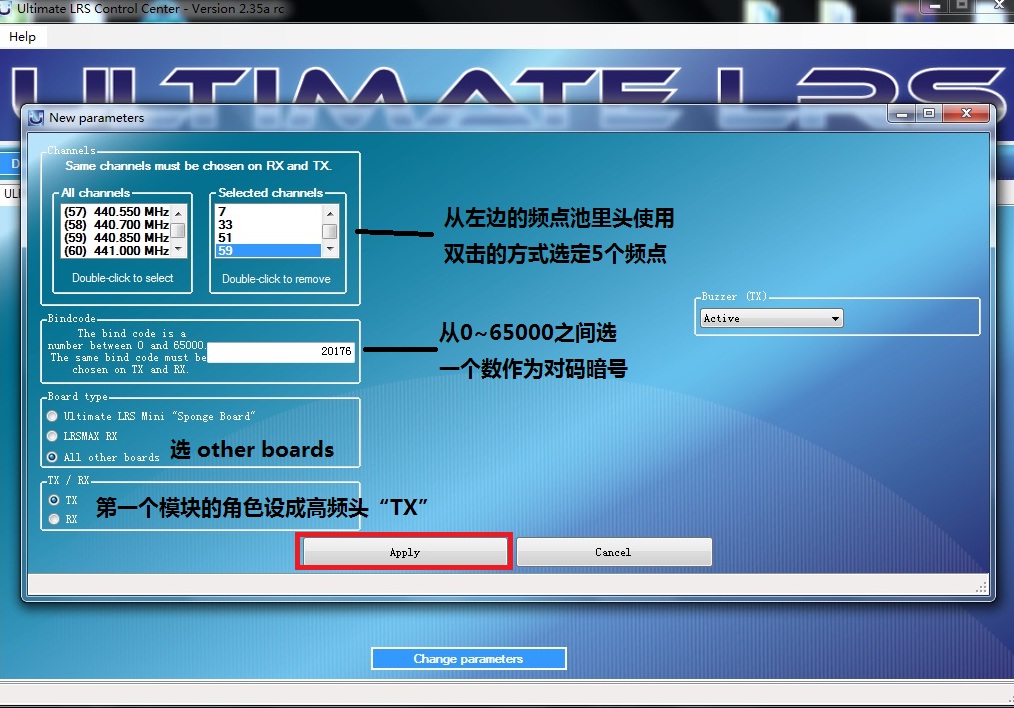
成功了以后,你很可能需要重启CC。这时候一般CC会识别出当前连接到PC的模块显示在串口栏,连接以后,第一次使用会提示需要更新配置。我们点击“Change parameters”:
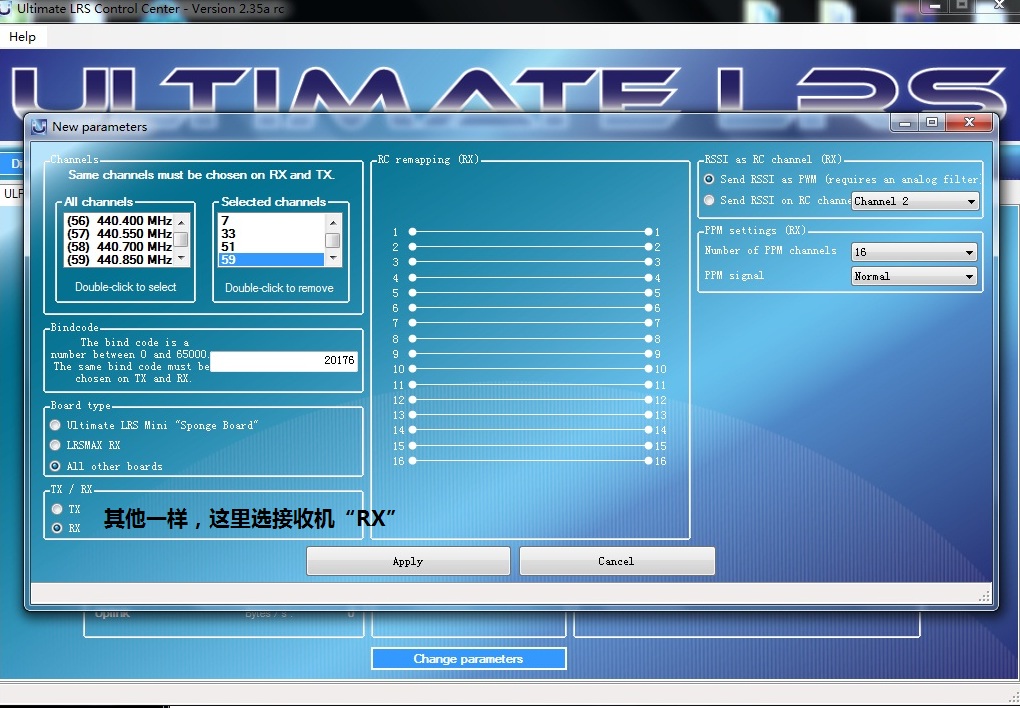
然后类似的,把另一个模块设置为接收机,注意发射和接收的频点和对码code必须一致。
这里需要再穿插介绍一些信息。
作为高频头的模块,串口波特率是57600,不管是直接通过TX/RX管脚来通讯,还是通过USB口连接(MissionPlaner)MP,波特率都是57600。
作为接收机的模块,串口波特率是19200,它和APM建立连接之前,还需要把APM的串口的波特率设为19200(APM参数 SERIAL1_BAUD 设为19);对于Pixhawk同理,和ULRS接收机通讯的那个串口必须是19200.

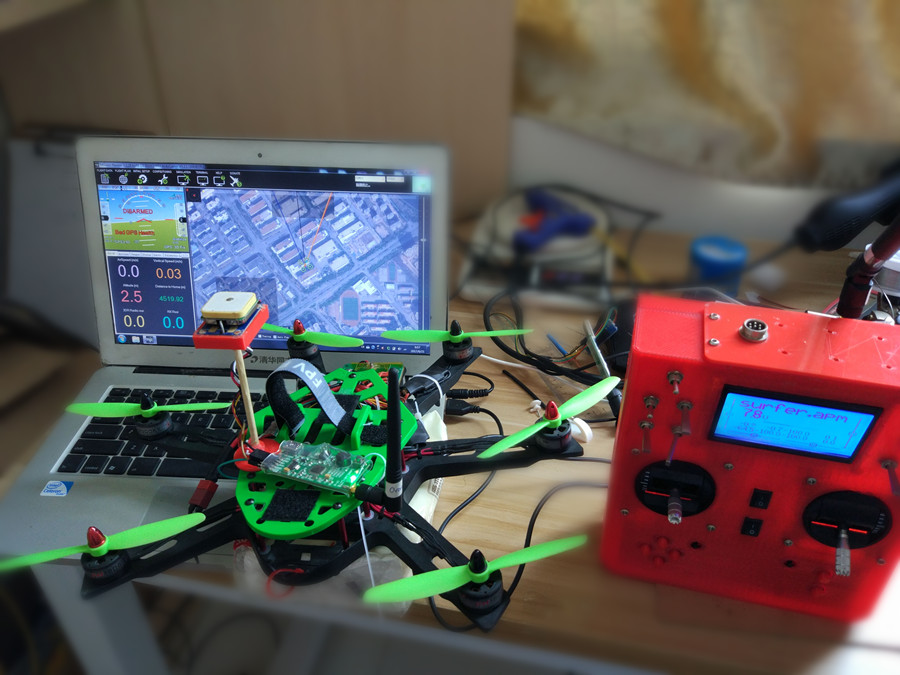
随后,我们先把高频头简单的和发射机连接起来,我用的DIY的发射机电压是7.4V,因此可以直接输给高频头。标准的高频头插槽的管脚线序请参考OpenLRS相关章节”模块工作连线图”。
飞机那一边,和常见的PPM接收机差不多,就是多了串口:

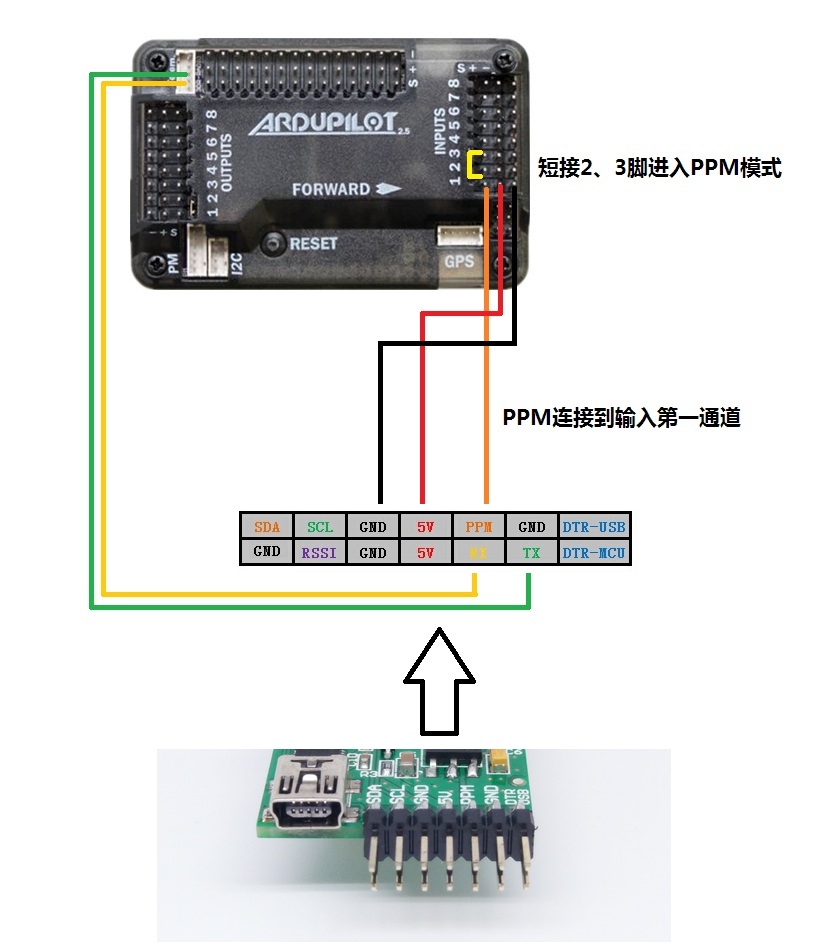
所有东西都连接好以后,上电,你会看到高频头和接收机各自的红绿LED开始闪烁:一个灯代表发送数据,另一个灯表示接收数据,建立连接以后,两个灯都应该持续闪烁。电脑通过USB线连上高频头,先打开CC,你会看到系统已经正常工作了。

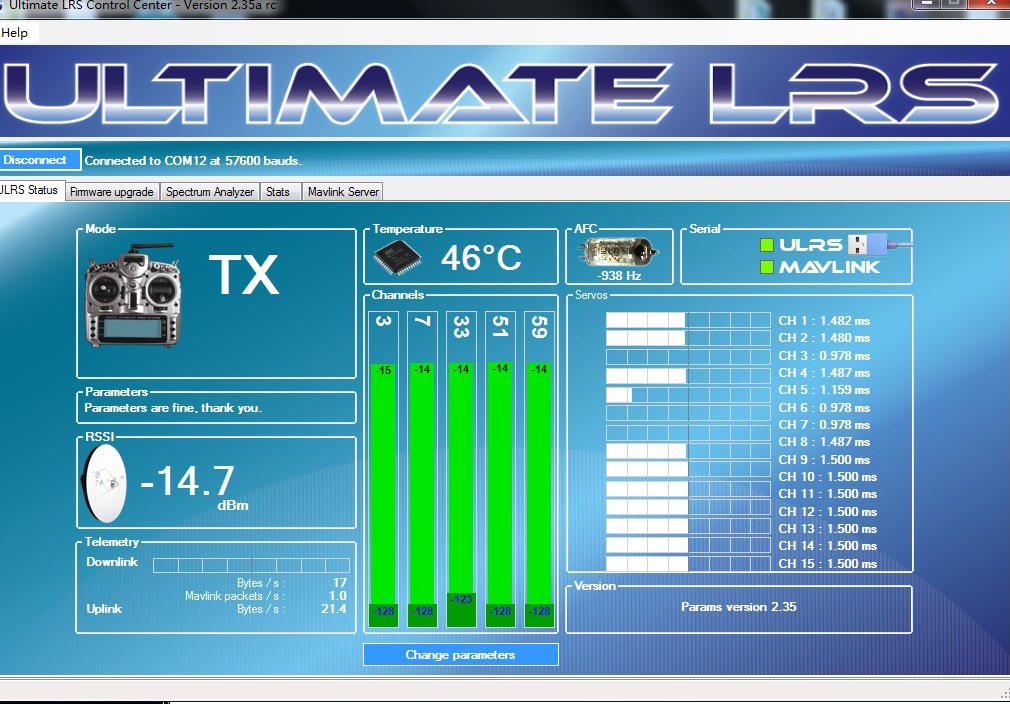
从CC的界面你可以从左边读取到平均信号强度,数据率等信息。中间你会看到模块温度和每独立频点的信号强度:浅绿色是当前信号强度,深绿色是背景噪声,你可以很容易的判断当前的信噪比,当前还有没有别的LRS系统具备该特性。右侧的白色柱状条指示当前每一个通道的信号值。
这里插叙一下信道的选择问题。和其他系统一样,ULRS使用了跳频的工作模式,一般来讲,在不考虑干扰的情况下,你大可随机选择信道,有的人喜欢选择连续的信道,比如 11-12-13-14-15 ,有的人喜欢跳着选,比如 15-19-23-27-31,这样都是可以的,因为一般干扰的信号不会有那么大的带宽,很少会“遮住”连续的一片频段。
从第二个角度,关于天线。天线都有一个工作的频率范围,假如你的天线,买的也好,DIY的也好,在440MHz的频率下有最好的性能,在其他频率下性能急剧下降,这代表你的天线的工作频段很窄,那么你选择工作频点就要尽量在440前后来选择。测量天线的性能你可以使用N1201SA这类天线分析仪;我自己用的是对讲机加驻波表的方式,前者作为可调频率的信号源,用后者来读取天线在不同频率下的驻波参数。
第三点,也就是噪声了。从用户的使用反馈和统计数据上来看,ULRS对机载设备的干扰不是那么的敏感;不像别的一些产品的用户,每天都在讨论自己是如何用铝箔包裹Gopro来降低噪声,诸如此类等等。不管事实是否如此,这里还是要介绍一种规避噪声的方法。我们主要考虑机载设备的干扰,把所有设备打开,然后把飞机上的模块连接到CC,界面左上图案是一架客机,并且显示为RX,说明已经识别为接收机,然后看Channel一栏,五条绿色柱子代表你选择的五个信道。浅绿色柱子表示信号强度,深绿色表示噪声; 如果某些信道的信号强度明显比其他的信号低,或者某些信道的噪声明显比其他的高,那么你最好弃用它们重新选择信道。
注意:
1.当前界面中只能显示CC直接连接的模块的信号值,也就是说,假如连接到CC的是你的高频头,那么这里反映的是你高频头接收到的信号,并不能反映接收机一侧当前的信号或噪声。
2.当高频头连接CC以后,蜂鸣器不再工作,如果回传的数据丢包,你听不到beep声。
然后我们关闭CC,打开MP来看看Mavlink数据是否正常(记得波特率57600),果然,一切如你所愿:
失控保护功能的使用很容易:在收发模块都在正常工作的时候,按下高频头一侧的按钮,当前发射机的杆量就会被储存到接收机的EEPROM里。另外,ULRS建议为了实现多一级的保护,可以在APM/Pixhawk中同时开启“GCS failsafe”功能,也就是在Mavlink连接中断10s后自动开启RTL。
最后,和OpenLRS一样,ULRS也有频谱分析仪的功能,只是风格不太一样。
点击”Spectrum Analyzer“选项卡进入界面,功能将自动运行:
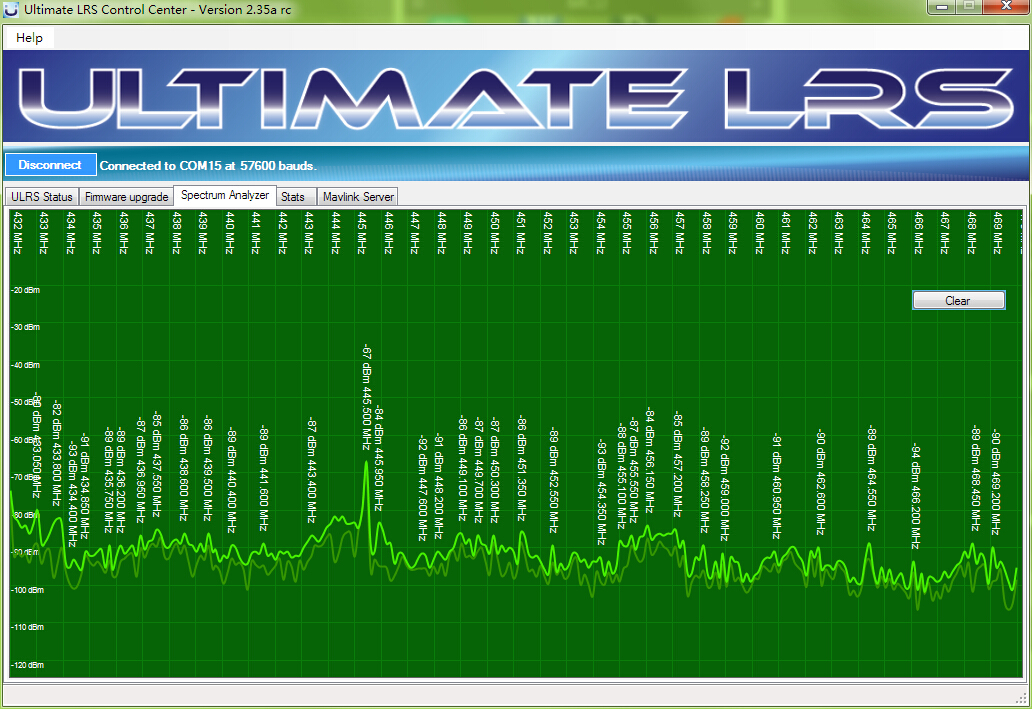
它的风格和OpenLRS不太一样,频率范围涵盖了ULRS可能用到的的整个频段(432~470MHz),同时会把每一个信号的尖峰的强度和频率标注出来。例如从上图中可以读出,在445.5MHz处有一个强度为-67dBm的信号。扫描结果会一直合并进入统计,点击“Clear”可以清零重来。