在2019年三月我完成了这台双旋翼尾座式VTOL飞行器的制作与飞行。
//——————————分割线——————————
1.飞控
KK2.0飞控在当前众多各色飞控的光环下并不起眼,但它却在VTOL领域大放异彩。
自带液晶屏和按键,不需要PC的参与即可调参,是KK飞控的一大特色。这种self-contain的特性让爱好者的外场调试变得轻松与简单。VTOL飞行器类目众多,基本分为SLT、TS、TR几类。不同布局的VTOL飞行器需要不同的控制方法,比如Tail-Sitter在不同飞行模式下的水平参考面不同,比如Tilt rotor在悬停转平飞的过程中需要缓慢的将推力动力组从垂直切换到水平。OpenAero(后面简称OA)之所以能够用一种固件通吃几乎所有的VTOL机型,核心原因就是它的八个输出通道可以独立的编程。在OA中,输入量包括四个通道和一个模式通道;控制量包括三轴陀螺仪的读数,三轴加速度计的读数,还有陀螺仪和加速度计联立求得的当前姿态角;输出量可以是所有输入量和所有控制量的一个加权求和,我们则可以设定其中的每一个成员的权重系数。举一个简单的例子,如果我们要让一个通道来控制副翼舵机,那么该通道的输出量就是副翼摇杆的输入量,如果要一点阻尼反馈,就加上Gyro-Roll,如果要实现自稳,就再加上AL-Roll,不需要用到的量的系数设为零。OA提供了一些参数范例供参考,不妨以此为基础进行微调。除了通道的可编程的特性外,OA还加入了一些普遍适用的功能来辅助VTOL,例如P1悬停模式和P2巡航模式采用两套独立的参数,P1到P2的缓切换等。
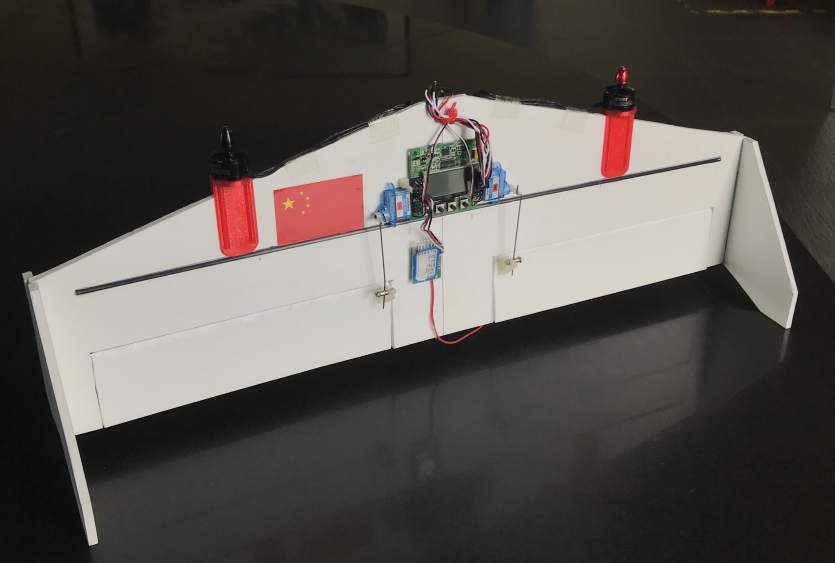
前面我制作的VTOL机型都是以MWC飞控代码为基础自己编程,这次我将使用刷了OA固件的KK2飞控制作一台双旋翼Tail-Sitter。这架飞行器的大体定位是VTOL验证机,因此机身必须容易制作,整体成本要低。机身将采用KT板,动力组采用我大量库存的Emax-MT1806电机+5*3桨,电池采用3s550mah。
2.机身结构
机身采用飞翼布局,制作简单,飞控设备直接贴在平板机翼上即可,尺寸如下:
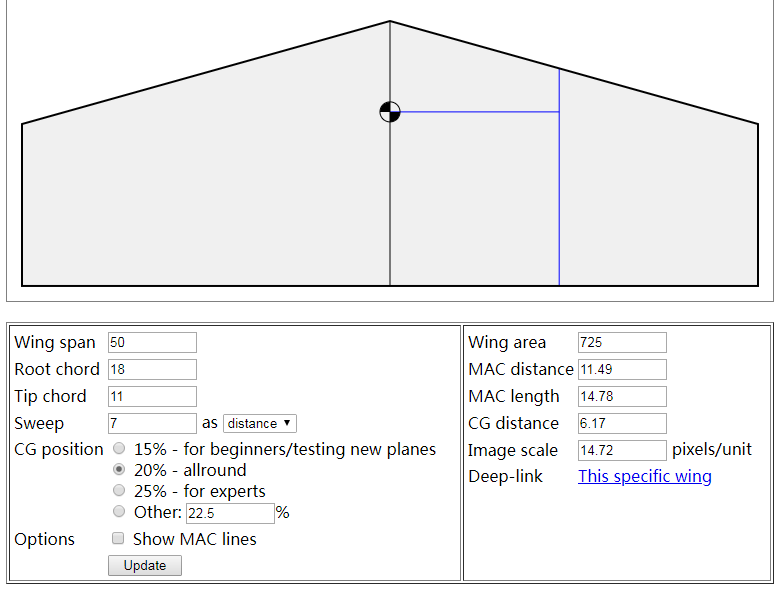
我另外在飞翼中段增加了宽度30mm的平直区域来安放电子设备。机身全部使用魔术板制作,好处是耐摔,用502胶就可以很好的粘合。机翼半埋碳纤棒增加刚性,为了在悬停有足够的操控力矩,舵面比较宽。起飞重量为210g。
3.悬停
室内无风情况悬停很容易,我用的P-I-AL参数是:
Roll 47 2 6
Pit 78 9 50
有风天就另当别论了,对于Tail-Sitter,整个机翼面积在悬停的时候都变成了受风面,飘的很;原本还设想让机身平转后以侧身的姿态来对抗风的侵袭,实际操作却根本做不到。
4.飞行
视频中是之前室内测试和室外试飞。
坦言,室外飞行效果很差。悬停就不说了,在出站过程中,压Pit后形成顶风的迎角,受迎风来流作用,舵面效果大大增强,导致Pit方向震荡;因此必须果断切换到P2进入FFF。最后撞树告终。
至于进站,至少对我而言,有风的时候是不可能的了。可能的方案是使用P1.5,以STOL的姿态降落。这也意味着要给TailSitter增加腹部的起落架了。
5.小结
200g这个重量级Tail-Sitter的性能天花板算是摸清了,亦也不打算再做下去了。