在众多现代电影中,都有V-22(鱼鹰)的身影,它兼顾垂直起降和高度远程飞行的能力,在诸如变形金刚和哥斯拉的剧中都有出色表现。

那么既然鱼鹰是当前实用性最强的旋翼式VTOL飞行器,那么我们能否制作一台类似的航模呢?
答案是肯定的,不过要先选好方向。
全尺寸真机采用的是可变桨距旋翼,旋翼既可以改变总距也可以改变周期距:就和模型直升机一样原理,一个旋翼不仅可以改变升力的大小,还可以产生俯仰和横滚的力矩。
采用同样的方式,加上两个旋翼的反扭力互补,取消了尾桨,再增加倾转机构,就是类似下图这台V-22,我猜作者拆了两台电动直升机模型才做成。

如果采用普通的定桨距旋翼,也是可以成功的,例如如下这台商品V-22模型,在尾部加装小涵道风扇进行俯仰方向的稳定辅助控制,布局上其实是一台三旋翼。

再进一步简化,仅使用两台舵机控制两个定桨距旋翼的V22式机型也有成功的例子。

https://www.rcgroups.com/forums/showthread.php?2589675-Semi-scale-depron-V22-VTOL-(with-plans!)
这时候,需要自己选择一个合适的方向:首先从成本和复杂度的原因排除了变桨距旋翼,从稳定性的角度排除了单纯的双旋翼,然后再从控制的简单性排除了三旋翼,所以,先说结果,很怂的我选择了四旋翼布局。
这里我想讨论为什么排除了双旋翼。在P1中,双旋翼通过改变旋翼角度,改变了推力线和中心的位置关系,产生俯仰力矩。假设我们进入P1.5,两个旋翼势必向前倾斜,才能逐步产生向前的推力,但是这个倾斜必将导致飞机低头,这时候又需要水平尾翼来平衡这个力矩保证飞机的水平姿态,因此单纯的双旋翼TR在进行出站的时候,如果没有足够的空速建立起水平位尾翼的操控性,俯仰稳定性是很差的。
我为了保证在零空速,甚至是逆风的情况下依旧可以顺利的切入P1.5,我必须保证充足的控制裕度,所以在飞机的前后各安放了一个小号动力组用来保证俯仰的操控性。如下是我的设计。

结构上,摒弃了摇篮式电机座,改用出轴式电机座,同时改用了更轻的舵机,显著的减轻了动力组的重量。
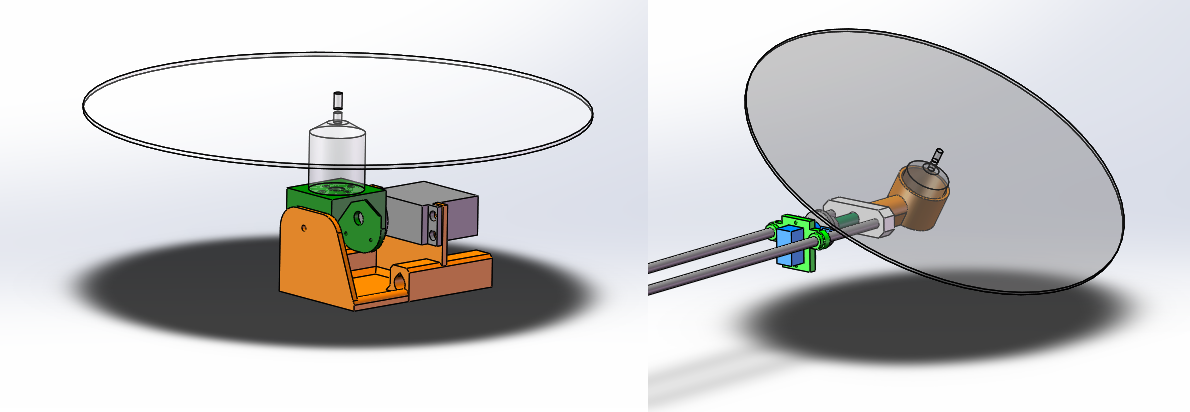
旧版设计中,使用42g舵机,新版换用了9g金属齿舵机,这是一个比较大胆的改动:经测试,该9g舵机的工作力矩为1.3kgf*cm,保持力矩为1.8kgf*cm,由于该舵机不会频繁动作,而且动力组的拉力线穿过舵机的旋转轴,舵机其实并没有承担太大的力矩,9g舵机是够用的,当然在后续的实践中也证实了这一点。另外主电机的电调改用了更轻的20A电调,也起到了减重的作用。

电机座是另一个有趣的地方。一开始,为了让进出站不带来重心的改变,我把主电机装在电机杯中,但是在试飞中出现了难以接受的震动,而我把电机杯翻转后,把电机安装在原本电机杯的底部,震动就消失了,这种改善我暂时没有很好的解释。这样做导致的一个缺点就是出站会让主电机前移,重心会向前推进一点。

机身使用了简易的半仓身式结构,好处是杂乱的走线全部往里面放,不影响外观的整洁;机翼采用了Flite Test系列KT机上常用的简易翼型机翼,很容易制作,性能则是介于平板机翼和全翼型机翼之间,性价比非常的高。
由于这是我的第二版设计,相比旧版拉长了整体的长度,让水平尾翼有更长的力臂来进行姿态的控制,同时水平尾翼的舵面面积也被加大了。机翼不再使用贯串整体的玻纤管来加强,而是采用埋碳纤片的方式,既有足够的强度也保证机翼轻盈。最后的整机不含电池重量810g,含电池起飞重量不到1kg。
控制方面:
在P1下,俯仰的自稳控制由前后的小旋翼来承担,同时除了小旋翼,大旋翼的俯仰动作也响应于摇杆;滚转当然用了两侧大旋翼的推力差实现;yaw方向依靠左右主动力组向不同的方向倾斜实现机动。在P1.5,主动力组共同向前旋转一定的角度,此时小旋翼依旧接管俯仰稳定性的控制。
在P2,主动力组向前旋转角度达到90度,不再产生垂直的升力,前后小旋翼停机,俯仰靠升降舵操控,我在实践中,开启了陀螺反馈。滚转当然是用副翼,同时我加入了autolevel反馈以增加稳定性。最后,因为没有垂直方向舵,我在P2增加了主动力组差速控制。
机电部分配置如下:左右的主动力组采用2217电机,kv值1100,配合1055正反螺旋桨;动力组舵机满行程为270度的9G舵机(控制信号脉宽0.5~2.5ms),在标准的1~2ms控制脉宽下,也保证有135度的最大转动角度。前后小旋翼使用已经淘汰的PM1806电机+5030桨。
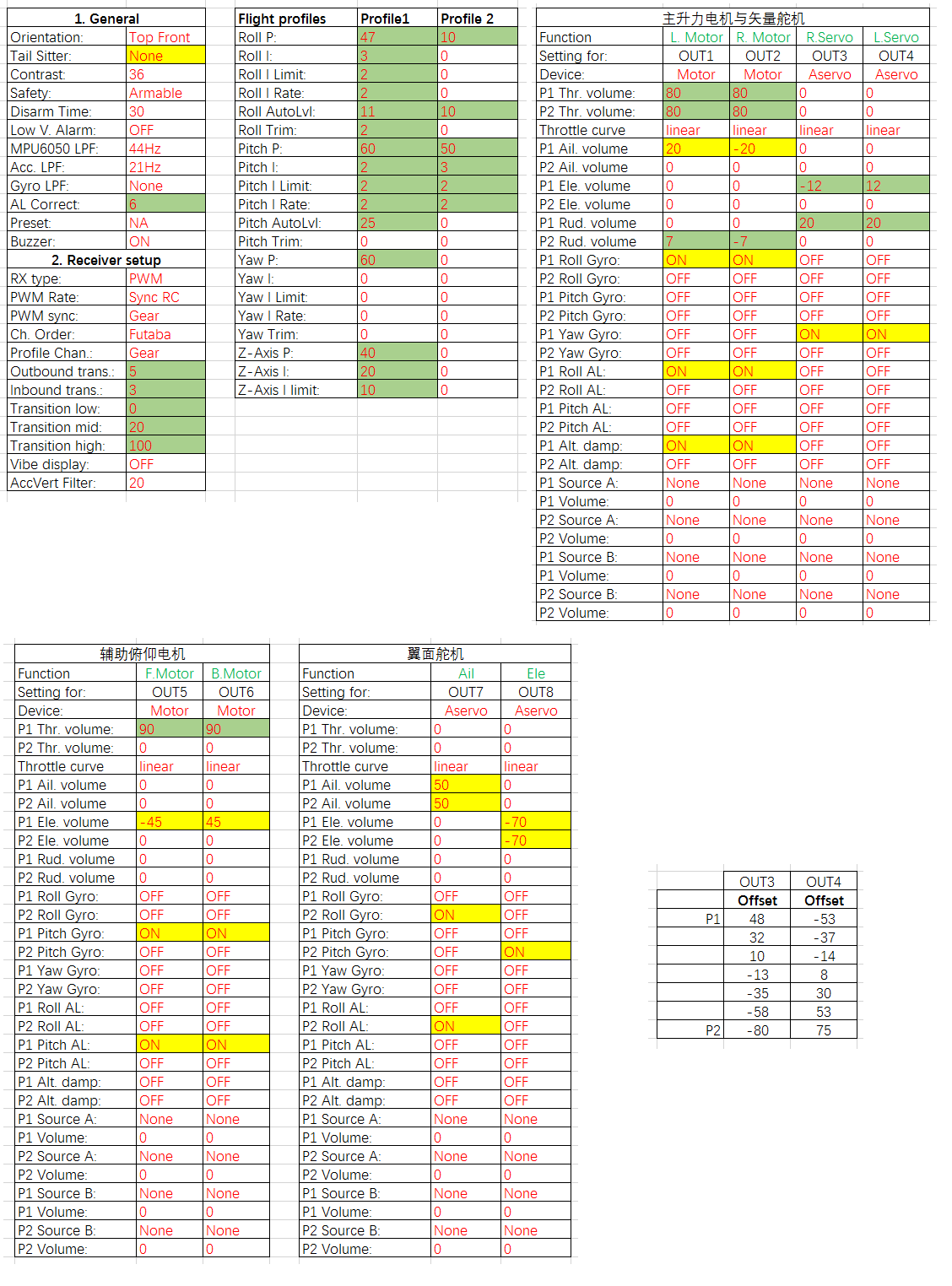
飞控使用的是VTOL固件的KK2,相关参数如下:
操控上,当你在室外的时候会发现,P1是非常难用的,使用P1.n顶风,让舵面参与控制才是保持稳定的王道。P2下,由于有陀螺和加速度计参与反馈控制,手感非常的柔和,基本上是练习机的感觉。roll方向很稳定,没有震荡,由于动力冗余足够,桨的转速不高,动力组的声音很小。
在此,宣告本机达到设计目的。